
Package : P705 + EV1 + ACU 200 + Cablage Seatalk + Vérin mécanique type 1 – EV 200 Sail linear
Les exemples des voiliers Ariel, Auskalo, Blue Eyes, Boisbarbu, Fayus et Manzanillo, m'ont permis de nourrir ma réflexion. Merci à eux et à l'association des Feeling pour leurs comptes rendus.
Précédemment Floan bénéficiait d'un pilote Autoelm 3000 couplé à la barre à roue par une courroie. Ce qui était suffisant pour les manœuvres d'entrées et de sorties de port ainsi que la navigation par petit temps, mais pas pour de la navigation par mer formée ou au portant.
J'ai choisi d'installer le vérin dans le volume en arrière de la cabine pour ne pas diminuer l'espace disponible pour les jambes et les pieds au-dessus de la couchette arrière et de le fixer sur la cloison séparant cet espace du coffre arrière. Cela permet par ailleurs de raccorder le bras du moteur et le capteur d'angle sur le secteur d'angle de barre déjà existant. Il a fallu que je fabrique une petite pièce en U pour allonger le secteur d'angle et y fixer le bras et poser une cale pour y fixer la tringle du capteur. J'ai renforcé la stratification de la cloison sur laquelle est fixer le moteur et stratifié un bâti pour poser le capteur.
Fixation du moteur sur la cloison coffre/Coqueron - Bâti stratifié pour capteur d'angle
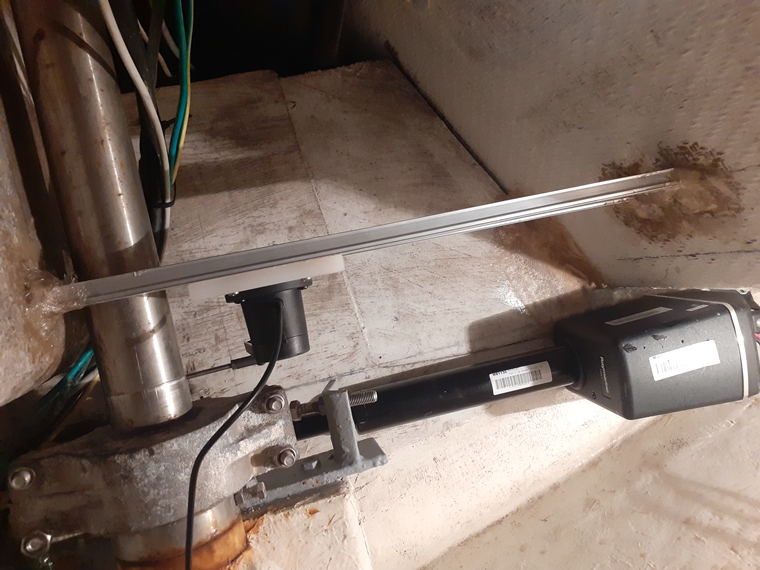
Cale de fixation pour tringle capteur d'angle - Rallonge de secteur d'angle de barre pour fixation du bras du moteur

Pour l'instant son fonctionnement s'est montré entièrement satisfaisant, mais je n'ai pas eu l'occasion de l'utiliser au-delà de 30 nœuds de vent et plus de 3 mètres de houle.
Yvon, sur Floan.