
The Choice
When I bought my Feeling 1090, it had a Raymarine st-4000+ autopilot. In my opinion, this autopilot is not adequate for our vessels; it may work properly on smaller sailboats, but with 5 tons of displacement, the ST4000+ is not able to maintain the course with strong winds or waves.
Due to that, l was looking for a good autopilot for my Feeling.
I looked for information on some autopilots. I think that the best option (quality/price) is the CPT Autopilot (more or less 1900 USD). Because I have small children, I don’t like a belt working with the rudder wheel, where children can damage their fingers. For that reason, I did not choose this option.
Another good option is the Pelagic autopilot (2800 USD). And the golden option is an NKE, but its price is too high for me. I wanted a hydraulic A.P; I dont like Raymarine, because of some bad experience with their products. On the market I saw Furuno (3700 €), Garmin (3500 €), B&G (4500 €) and Simrad (3500 €).
It was a lot of money. Playing with a flying drone of 50 €, I observed that the electronic brain of that toy was more powerful than our autopilots. If I blew on the drone, it was able to correct its position very quickly and maintain it. With no big gyros, only small electronics, accelerometres. I found some projects of autopilot, Arduino-based for some of them, on the internet. And one based on Raspberry computer.
The Pypilot. It’s an open source marine autopilot. Code written by Sean D'Epagnier.
This guy, USA based, has developed the code that is totally compatible with open CPN. It also offers the product ready for installation, or you can visit the web and build it yourself. I bought the autopilot computer and the motor controller (324 USD delivered at home). I also bought another raspberry with a screen to install the open CPN and have a plotter on the chart table. (but it’s not necessary, 196 €).
I enquired about the actuators, but for some reason I prefer a hydraulic unit. Some people say that for our displacement, a mechanical actuator is better than a hydraulic one. I don't know. Jeffa has very good mechanical actuators.
Looking for a hydraulic actuator, I discovered that B&G, Garmin, Simrad and Pelagic used the same builder, Hy-Pro, from the UK. I selected one actuator with a thrust of 350 kg, enough for the Feeling 10.90. Typical consumption 1,3 amps, max consumption 14 amps. It’s a compact unit with engine, oil and cylinder in the same sealed unit. The price was 1200 € (on the website in the UK 1400, in Spain 1600 and in France 1200 €).
https://www.hypro.co.uk/products/hydraulic-pumps-and-steering/linear-actuators/ml40-compact-marine-autopilot-electro-hydraulic-linear-actuator/
The Installation
The easiest way to install was to set the actuator on a platform in the port cabin, screwed with L plates to the transversal and to the longitudinal bulkheads.
The actuator was placed in the same pin as the rudder bar. Because the hydraulic range was only 21 cm, I had to adjust the rudder limits, closing a little bit the wheel turning range (one quarter of wheel on each side). In the future, I may drill a new hole in the rudder connecting to the rod to recover the original range. On the same platform, I installed the motor controller.

The electrical set-up was easy. A new block of switches in the chart table, 2 6mm-wires directly from the chart table's switch to the motor controller. And the autopilot, the actuator and the rudder sensor directly to the motor controller. One 15-amp resettable circuit breaker was installed.
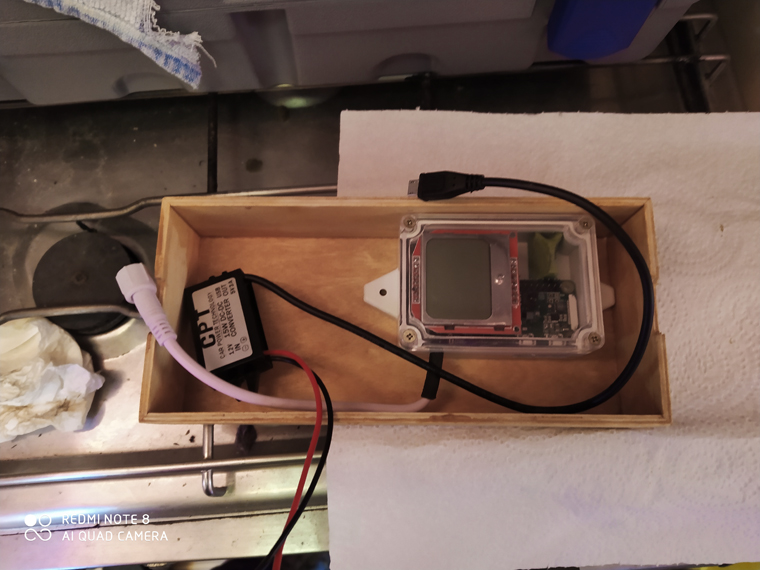
The autopilot unit is not totally watertight. I have placed a wooden box inside the port cabin, near the porthole. When you open the box, you can see the screen across the porthole. To handle it I have an IR remote control with 7 buttons (Auto, Menu, +1, -1, +10, -10, Select). I think that it’s possible to program one button for other orders (all rudder to port, for example).

At the moment I have not tested it at sea much; on good seas it works perfectly, and I hope that it will also in bad weather, but I have not tested it on rough seas. If I am not satisfied with it, I will install the electronic Pelagic Autopilot (875 USD).
 Best Regards
Best Regards
Aritz, sur Auskalo