
Principe
Pour détecter les positions haute et base de la dérive, deux détecteurs de proximité sont fixés sur des petits supports en alu :
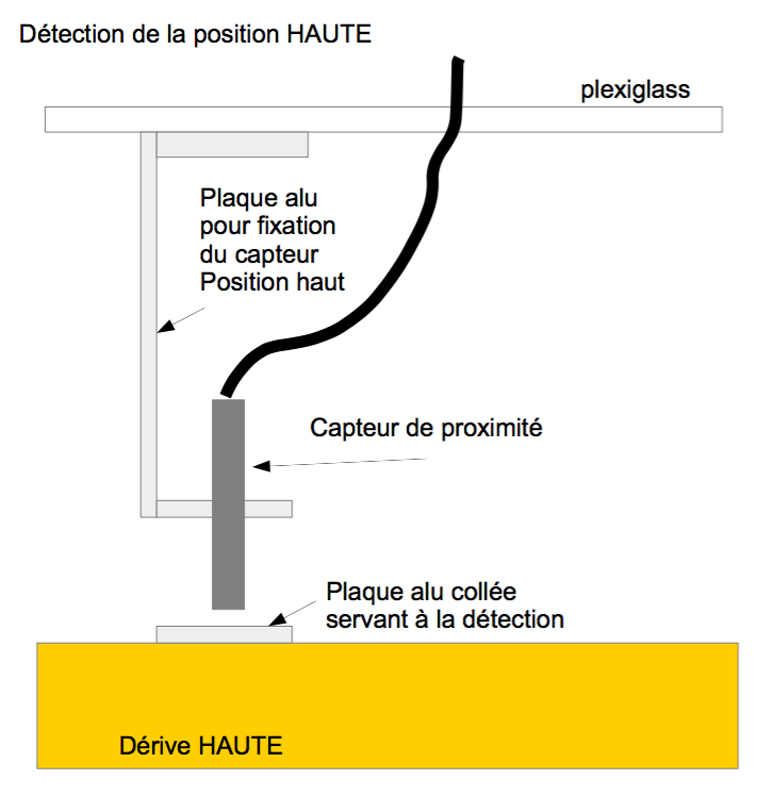
- Détection HAUTE :
le capteur est fixé sur la plaque de plexiglas (cache du puits de dérive). Le capteur détecte la position haute en utilisant le méplat de la dérive lorsqu'elle est en position relevée. Une petite plaque en alu est collée sur le méplat de la dérive et sert à la détection (capteur très proche de la plaque d'alu).
Lorsque la dérive est relevée, l'axe de rotation est repoussé vers l'avant dans le fond du logement et le méplat de la dérive est alors à l'horizontal et donc détecté par le capteur.
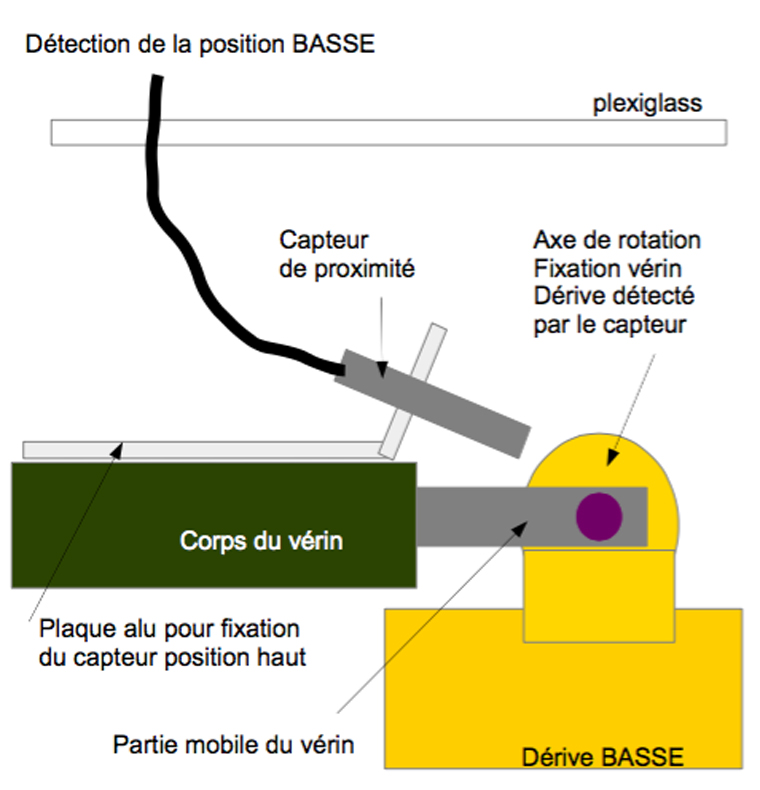
- Détection BASSE :
le capteur détecte la partie métallique de la fixation de la dérive au vérin ( axe de rotation).
Le capteur est fixé sur le corps du vérin hydraulique à l'aide de colliers de serrage.
Lorsque la dérive est basse, le vérin est rétracté et l'axe de rotation se trouve visible. L'axe est détecté par le capteur situé très près de la fixation du vérin.
Les deux capteurs sont alimentés en 12v et fournissent une sortie 12v lorsqu' ils sont actifs, c'est à dire à la détection.
Le 12v provient du 12v prélevé sur le voyant marche/arrêt allumé après la mise sous tension effectuée par le bouton poussoir (situé dans le compartiment pompe) ou sur le poussoir situé près de la barre à roue.
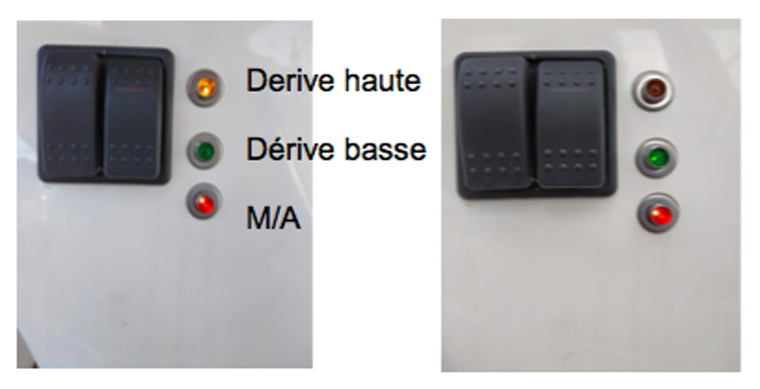
A la mise sous tension, le voyant M/A rouge s'allume et l'un des voyants de position s'allume suivant la position haute ou basse de la dérive.
NB : les boutons de commande extérieurs sont montés en parallèle des boutons de commande situés sur le panneau intérieur dans le compartiment moteur/pompe.
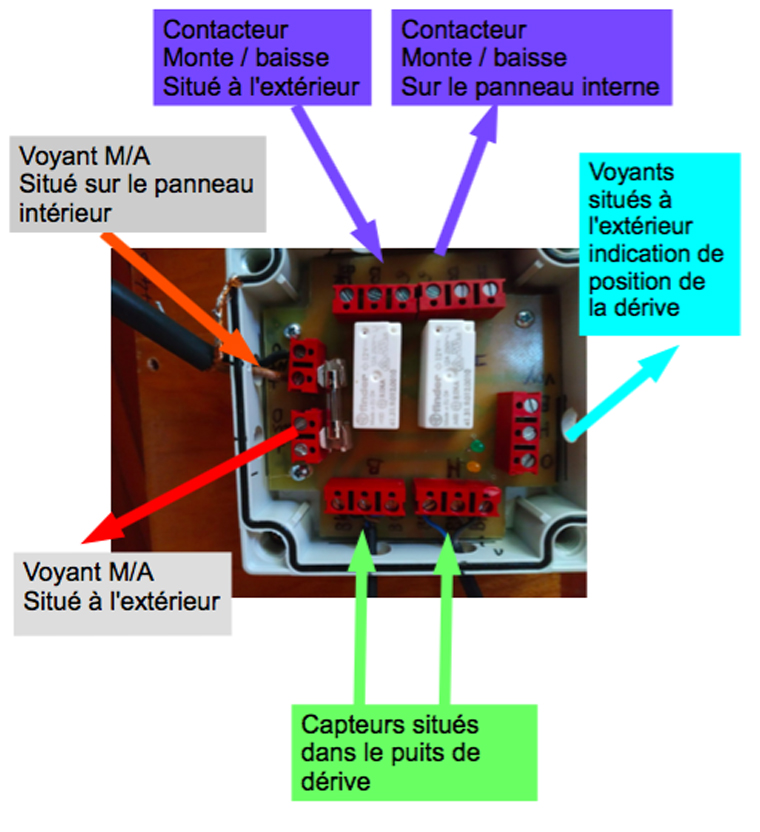
Une boite de commutation est fixée sur le panneau vertical du compartiment moteur/pompe.
Lors de l’activation des capteurs (détection haut ou bas), un signal 12v sert :
- à l'allumage d'un voyant (vert ou jaune selon la position)
- À coller un relais dont les contacts sont reliés à la commande « monte et baisse »
Respectivement la dérive basse allume un voyant vert (position normale de fonctionnement),
la dérive haute allume un voyant jaune (position temporaire).
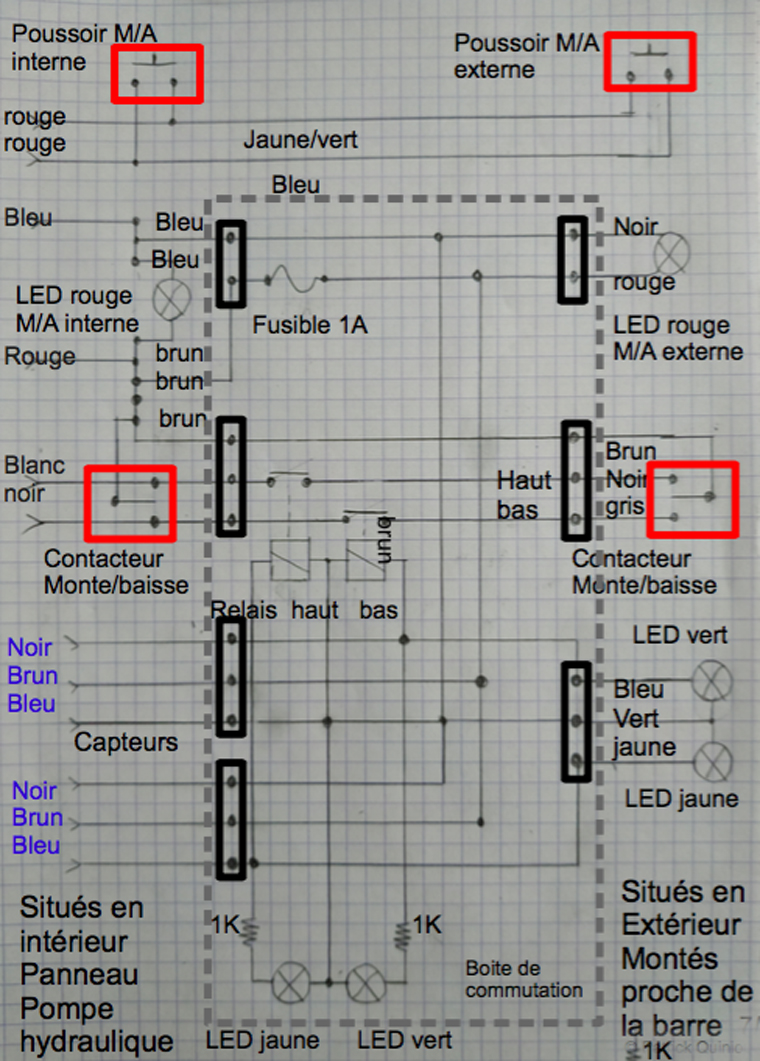
La boîte de commutation contient un circuit imprimé avec les connecteurs servant aux connexions des câbles, deux relais servant à interrompre les commandes « monte et baisse » à l'arrivée sur les fins de course.
Deux petits témoins 'LEDs' sont situés dans la boîte de commutation. Vert dérive basse, jaune dérive haute (pour contrôle).
Le câblage se fait en respectant la logique : A partir de l'extérieur, la commande « monte » se coupe lorsque la dérive arrive en position haute. La commande est coupée par le relais "RH"
A partir de l'extérieur, la commande 'basse' se coupe lorsque la dérive arrive en position basse. La commande est coupée par le relais "RB"
Câblage
Les fils des capteurs passent au travers du plexiglas, à travers la cloison en bois pour arriver dans le compartiment moteur/pompe et sont connectés à la boîte de commutation.
Le voyant M/A existant (LED rouge) est connecté vers la boîte de commutation en respectant les polarités. C'est la source de 12v qui alimente les capteurs, relais et voyants. Un fusible F1 de 1A situé dans la boîte protège le 12v.
Le voyant rouge extérieur situé près de la barre à roue est connecté sur le boîtier. Il s’allume dès qu'on commande le M/A (bouton impulsionnel).
Les voyants de signalisation « haut jaune » et « bas vert » situés près de la barre à roue sont reliés par un câble à la boite de commutation. Pour autoriser ou interdire les commandes haut et bas, le bouton déporté près de la barre à roue est connecté au boîtier de commutation .
Le bouton de commande « monte et baisse » situé dans le compartiment moteur est raccordé au boîtier de commutation. Les commandes du bouton « monte et baisse » extérieur sont coupés par les relais. Les relais activent ou désactivent les commandes venant du cockpit. Le moteur/pompe se coupe donc des l'arrivée de la dérive sur ses capteurs (fin de course).
Nb: les boutons et voyant situés dans le compartiment moteur/pompe restent opérationnels et peuvent commander la montée ou la descente de la dérive sans que les fins de course ne soient actifs. Dans ce cas seule la signalisation haut/bas reste active. En cas de coupure du fusible les commandes intérieures ou extérieures restent actives mais les voyants extérieurs resteront éteints et aucun fin de course ne fonctionnera. Les commandes situées sur le panneau interne restent donc toujours actives.
Interconnexion
Connexions boites de commutation située sur le panneau interne (moteur / pompe)
Matériel
Capteur de proximité capacitif BALLUFF ip68 inox avec câble de raccordement
Réf M08EH PSCR0F S49G type PHP NO(normalement ouvert)
Voyant LED rouge, vert , jaune diam 12mm
Relais 12v SDT NF (normalement fermé) coupure 10A
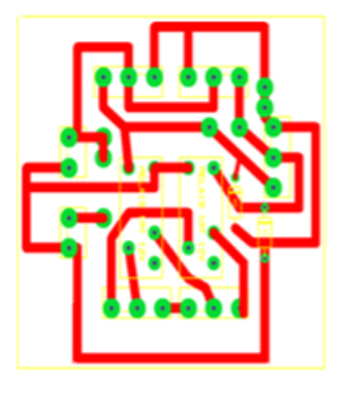
Circuit imprime situé dans la boite de commutation

Patrick, sur Jah Maya.